Table of Contents
Introduction: Robotics as a Foundational Business Function Transforming Modern Technology
Robotics is one of the most consequential technological disciplines of our time. It has become one of the most important pillars of our modern technology. It brings together mechanical engineering, electronics, software, and data science into systems that can sense, decide, and act in the physical world. For decades, it was thought of mainly as a manufacturing tool. Today, it reaches into healthcare, agriculture, logistics, retail, defense, and dozens of other fields. The transformation has been quiet but relentless.
What changed is not just the technology. What changed is the way organizations think about Robotics. It is no longer a tool sitting at the edge of operations. It is becoming a core business function, as central to how an organization runs as its finance team or its supply chain. Robotics shapes how processes get designed, how products move from concept to production, and how services reach the people who need them.
This shift matters because Robotics is not simply about replacing human effort. It is about extending what organizations can do. It makes operations faster, more consistent, and more resilient. It opens up service models that were not previously viable. It allows companies to scale without the same constraints they once faced. When an organization begins to treat Robotics as a strategic capability rather than a capital expense, it unlocks a fundamentally different kind of thinking.
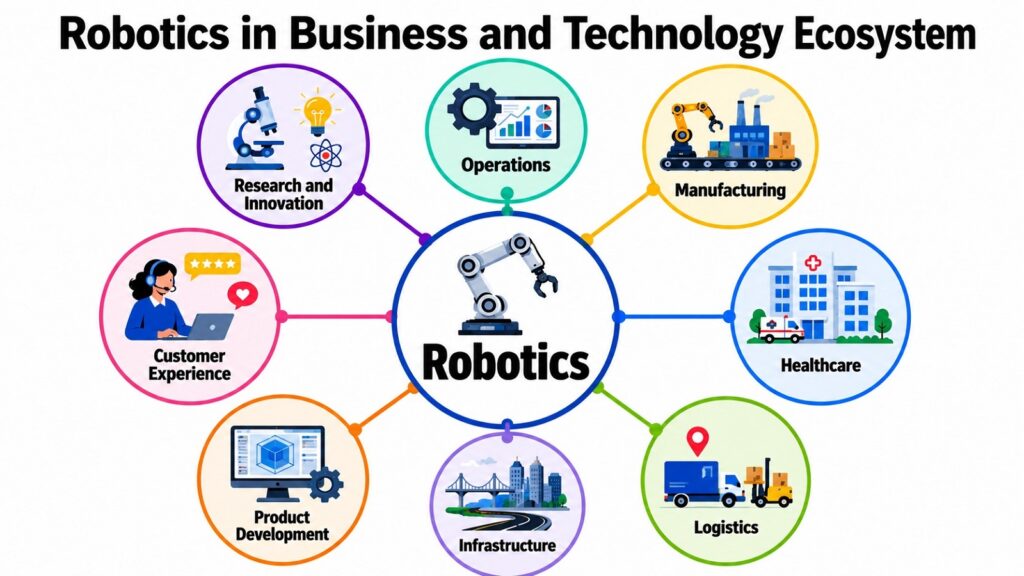
There is also a coordination dimension to Robotics that does not always get enough attention. A robotic system does not work alone. It operates within physical spaces, alongside people, connected to software platforms, and embedded inside workflows. That means Robotics success depends on how well all these pieces fit together. Architecture, sensors, motion control, human interaction, hardware, connectivity, and governance all play a role. Miss one and the whole system underperforms.
The central argument of this article is straightforward. Robotics becomes most valuable when it is understood as an interconnected ecosystem rather than a collection of machines. Each component reinforces the others. Each foundation described in the eight sections that follow contributes something that the others cannot provide alone. Together they explain how Robotics is built, how it operates, and how it delivers lasting value.
Table 1: Robotics – Eight Foundations and Their Primary Value
| Foundation | Primary Value |
| Architecture | Determines structure, flexibility, and physical capability |
| Sensors and Perception | Enables environmental awareness and responsiveness |
| Motion and Control | Converts capability into precise, consistent action |
| Human-Robot Interaction | Connects systems with human workflows and acceptance |
| Hardware Infrastructure | Provides the physical platform for reliable operation |
| Connectivity and Integration | Expands value through ecosystem coordination |
| Applications | Translates foundations into measurable industry outcomes |
| Ethics and Governance | Sustains trust, safety, and long-term deployment |
1. Robotics Architecture: Building the Structural Foundation of Intelligent Systems
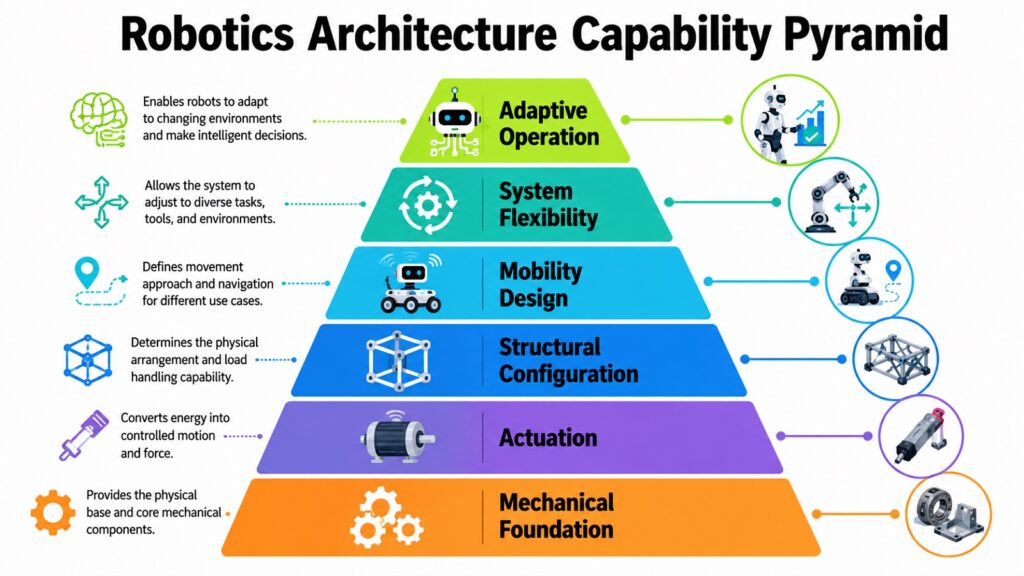
Every robotic system begins with a set of structural decisions that shape everything else. Robotics architecture refers to how a system is physically organized and how its components relate to one another. It covers mechanical design, joint configuration, mobility type, load capacity, and spatial arrangement. These choices are made before a single line of software is written, and they determine what the robot can and cannot do throughout its entire operational life.
Architecture is not just about appearance. A robotic arm mounted on a fixed base will behave very differently from a mobile platform navigating a warehouse floor. The first trades reach and precision against a limited operating zone. The second gains spatial flexibility but faces challenges in positioning accuracy and obstacle avoidance. Both are valid architectural choices, but each one suits a specific set of tasks and environments.
Modular architectures are becoming more common in professional Robotics. Instead of building a single rigid structure optimized for one task, designers create systems where components can be swapped, reconfigured, or extended. This approach increases longevity and reduces the cost of adaptation when operational requirements change. A robot that can be reconfigured for a new task without full replacement is significantly more valuable over time.
Parallel kinematic systems, where multiple mechanical links act simultaneously to position an end effector, offer speed and rigidity advantages that serial kinematic designs cannot easily match. Serial designs, where joints are arranged in sequence like a human arm, offer greater reach and flexibility in unstructured environments. Neither is universally superior. The right choice depends entirely on what the robot must accomplish.
Architecture also influences maintenance. A well-designed structure exposes wear points, allows access to critical components, and keeps the robot operational longer between service intervals. Poor structural design, even when capable in its prime condition, tends to degrade faster and cost more to maintain over time.
The most important architectural insight is that mechanical design sets a ceiling on performance. Software optimization, sensor upgrades, and better control algorithms can improve a robotic system, but they cannot exceed what the physical structure allows. Choosing the right architecture at the outset is therefore one of the highest-leverage decisions in Robotics development.
Table 2: Robotics Architectural Approaches and Their Defining Characteristics
| Architectural Approach | Defining Characteristic |
| Serial kinematic arm | Sequential joints offer wide reach and flexibility |
| Parallel kinematic system | Multiple simultaneous links provide speed and rigidity |
| Mobile wheeled platform | Ground navigation with variable positional precision |
| Legged robot | Terrain adaptability at the cost of mechanical complexity |
| Collaborative robot (cobot) | Lightweight design optimized for human proximity |
| Modular reconfigurable system | Swappable components extend operational lifespan |
| Fixed gantry system | Overhead mounting enables large-area coverage |
| Soft robotics structure | Compliant materials allow interaction with fragile objects |
2. Robotics Sensors and Perception: Enabling Robotics to Understand the Environment
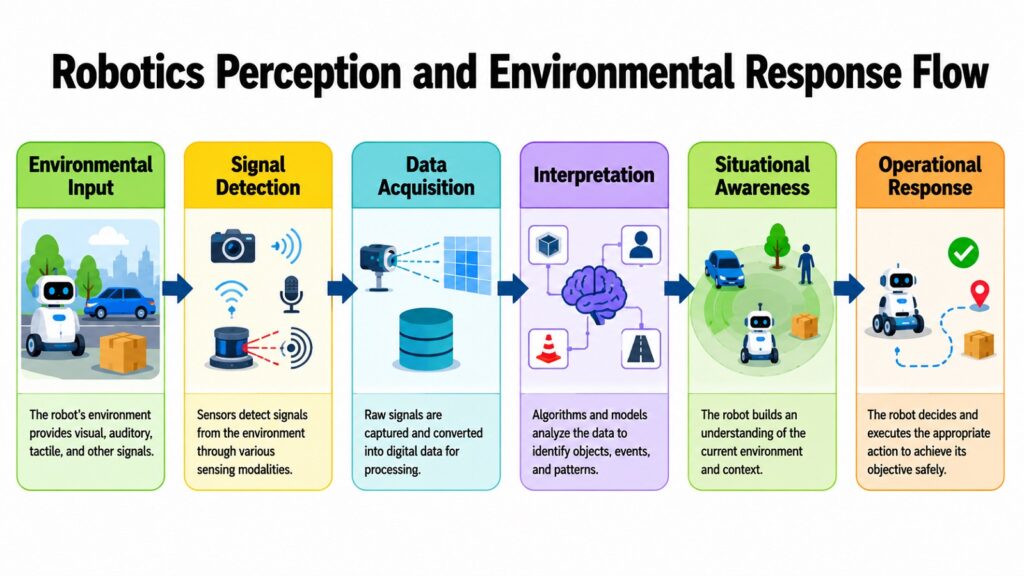
A robot that cannot sense its environment is little more than a programmed machine following a fixed script. Sensors change that. They give Robotics systems the ability to gather real-world information and use it to make decisions. Perception is what separates reactive systems from genuinely adaptive ones, and it is one of the most active areas of development in the field today.
Sensors translate physical reality into data that software can process. A camera converts light into pixel information. A lidar emits laser pulses and measures the time they take to return, building a three-dimensional map of surrounding space. A force-torque sensor detects how much pressure a robotic hand is applying to an object. Each sensing modality captures a different dimension of the environment.
The challenge is not collecting data. Modern sensors produce enormous volumes of it. The challenge is interpretation. Raw sensor data has to be filtered, processed, and combined before it becomes useful. A camera on its own cannot reliably distinguish between an obstacle and a shadow in poor lighting. Combining camera data with depth sensing or infrared imaging produces a much more reliable picture of the scene.
Sensor fusion, the practice of combining data from multiple sensor types, is central to modern Robotics perception. When signals from complementary sources are merged intelligently, the system gains redundancy and accuracy that no single sensor can offer. Autonomous vehicles are perhaps the most visible example of this, relying on cameras, radar, lidar, and GPS working in concert to navigate safely.
Perception quality has a direct and measurable effect on business outcomes. A picking robot in a fulfillment center that misidentifies objects will generate returns and delays. A surgical robot that cannot detect tissue boundaries precisely will compromise patient safety. In both cases, the economic cost of poor perception is significant, and the trust cost is even higher.
As environments become less structured and more variable, perception requirements grow more demanding. Robotics operating in fixed, controlled settings can use simpler sensing approaches. Those deployed in unpredictable real-world conditions need richer perception pipelines. This distinction will increasingly define which systems are capable of widespread adoption and which remain confined to specialized environments.
Table 3: Robotics Sensing Approaches and Their Practical Perception Roles
| Sensing Approach | Practical Perception Role |
| Camera (RGB) | Visual identification of objects, faces, and environments |
| Lidar | 3D spatial mapping and obstacle distance measurement |
| Radar | Object detection in low-visibility or adverse conditions |
| Force-torque sensor | Detects contact pressure for safe manipulation |
| Ultrasonic sensor | Short-range proximity detection for collision avoidance |
| Infrared sensor | Heat-based detection for presence and thermal profiling |
| Encoder | Measures joint position and rotation for motion feedback |
| IMU (inertial measurement) | Tracks orientation, acceleration, and balance state |
3. Robotics Motion and Control Systems: Creating Precision, Stability, and Performance
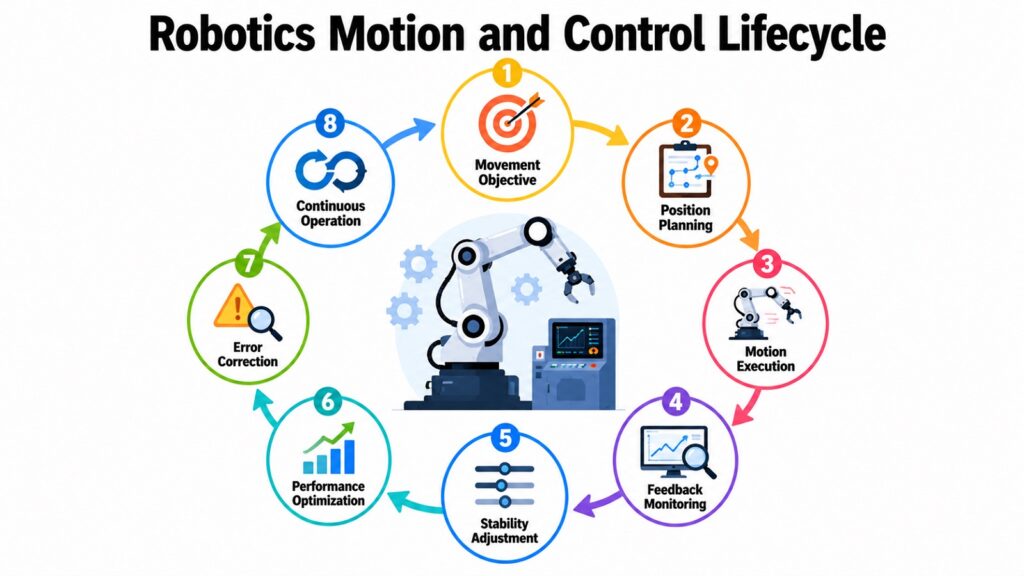
A robot may be well-designed and richly equipped with sensors, but it ultimately has to move. Motion and control systems are the mechanisms through which Robotics converts intention into physical action. They govern how joints rotate, how platforms travel, how end effectors apply force, and how the entire system responds to feedback from its sensors.
Control in Robotics is fundamentally about managing the gap between where a system is and where it needs to be. This gap is continuously monitored and corrected. The speed and accuracy of this correction process determines how precisely a robot can perform repeated tasks over time. In high-precision assembly, small control errors accumulate into product defects. In logistics, inconsistent motion leads to collisions, jams, and downtime.
Feedback loops are central to motion control. A system that only executes commands without checking results is called open-loop and is rarely used in demanding applications. A closed-loop system continuously compares its actual state with its intended state and adjusts accordingly. Proportional-integral-derivative control, one of the most widely used approaches in industrial Robotics, adjusts outputs based on the size of the error, the history of past errors, and the rate at which error is changing.
Trajectory planning is another important dimension of motion control. A robot moving from one point to another must do so in a way that is smooth, safe, and efficient. Abrupt movements waste energy, cause mechanical wear, and can damage the objects being handled. Planned trajectories that optimize for smoothness and speed simultaneously require significant computational effort, but they pay off in longer component life and better operational outcomes.
When motion becomes unpredictable or unstable, the operational consequences are serious. Vibration during fine manipulation reduces accuracy. Jerky movement near human workers creates safety hazards. Energy-inefficient motion inflates operating costs. Control systems that address these issues do more than improve technical performance. They build the kind of reliability that makes Robotics a trustworthy part of production and service environments.
Trust is the quiet outcome of good motion control. When a system moves consistently, predictably, and within expected parameters, people around it become comfortable. Adoption accelerates. Operators reduce supervision. That confidence is not built by the robot’s physical form or its software intelligence alone. It is built, in large part, by controlled, deliberate, well-executed movement.
Table 4: Robotics Control Principles and Their Operational Effects
| Control Principle | Operational Effect |
| Closed-loop feedback | Continuous correction maintains accuracy over time |
| PID control | Balances error response, history, and rate of change |
| Trajectory planning | Smooth paths reduce wear and protect handled objects |
| Torque control | Regulates force output for safe physical interaction |
| Impedance control | Adjusts stiffness to respond naturally to contact forces |
| Model predictive control | Anticipates future states to improve motion efficiency |
| Velocity limiting | Prevents overshoot and ensures safe operational speed |
| Redundancy resolution | Finds optimal joint configurations in flexible systems |
4. Robotics Human-Robot Interaction: Connecting Robotics with Human Capability
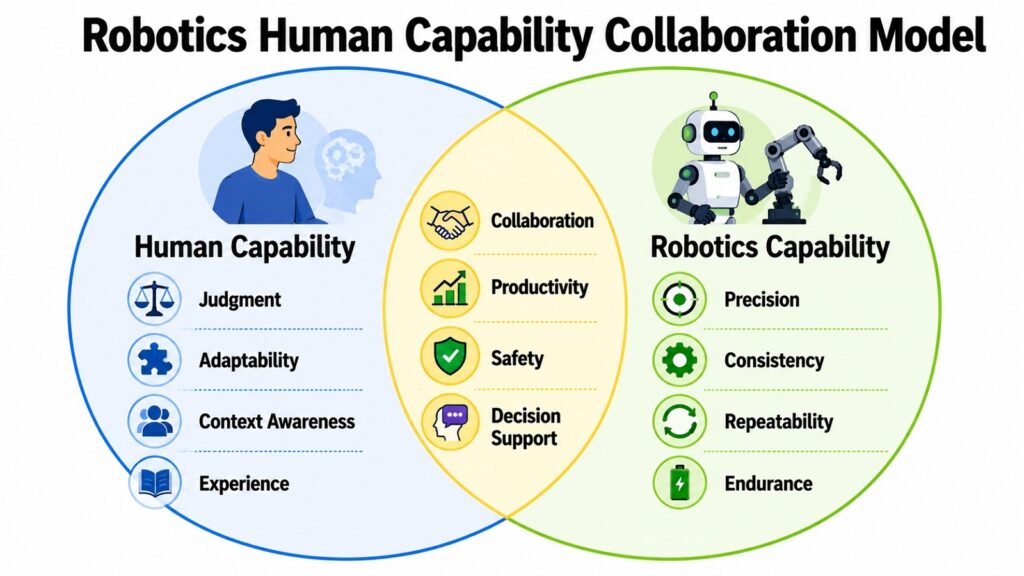
For most of Robotics history, the primary design concern was keeping robots away from people. Industrial systems operated behind safety barriers precisely because they moved fast, carried heavy loads, and had no way of knowing when a human had entered their workspace. That model worked in controlled factories, but it placed hard limits on where Robotics could be deployed.
Human-robot interaction changes that equation. When systems are designed to operate alongside people rather than away from them, an entirely different set of opportunities opens. Healthcare robots assist surgeons in operating rooms. Exoskeletal devices support workers lifting heavy materials. Collaborative robots, known as cobots, share assembly lines with human colleagues, handling repetitive or ergonomically difficult tasks while humans manage judgment-intensive work.
Interaction quality is shaped by multiple design dimensions. Physical safety comes first. A robot working near people must be able to detect contact, reduce force immediately, and stop if something unexpected happens. Beyond physical safety, the interaction must feel intuitive. If operators need extensive training to work alongside a robot, adoption will be slow and resistance will be high.
Communication between humans and robots is evolving rapidly. Early systems required formal programming interfaces accessible only to specialists. Current systems increasingly respond to natural language, gesture, touch, and even gaze. The simpler and more natural the interface, the wider the population of people who can work effectively with robotic assistance.
Cognitive load is a frequently overlooked aspect of human-robot interaction. If a robot requires continuous oversight and intervention, it increases the burden instead of alleviating it. Effectively designed interactions enable humans to delegate tasks with confidence, only needing to check in when absolutely necessary. Such seamless delegation necessitates that robots convey their status transparently, acknowledge uncertainty candidly, and manage exceptional situations with poise.
Successful Robotics deployment almost always reflects good interaction design. Systems that fit naturally into human workflows, match the pace and rhythm of the people around them, and communicate status in plain terms become part of the team rather than a source of friction. That integration is the goal, and interaction design is the path toward it.
Table 5: Robotics Human-Robot Interaction Principles and Practical Outcomes
| Interaction Principle | Practical Outcome |
| Force limiting on contact | Prevents injury when robots and humans share space |
| Natural language interface | Reduces training requirements and widens accessibility |
| Visual status indicators | Communicates robot state without requiring specialist knowledge |
| Gesture recognition | Enables hands-free, intuitive operational control |
| Compliant movement design | Allows safe physical guidance and repositioning by hand |
| Predictable motion patterns | Builds human trust through consistent behavior |
| Error transparency | Keeps operators informed and supports timely intervention |
| Task delegation interface | Reduces cognitive burden by enabling confident handoff |
5. Robotics Hardware Infrastructure: Powering the Physical Layer of Robotics
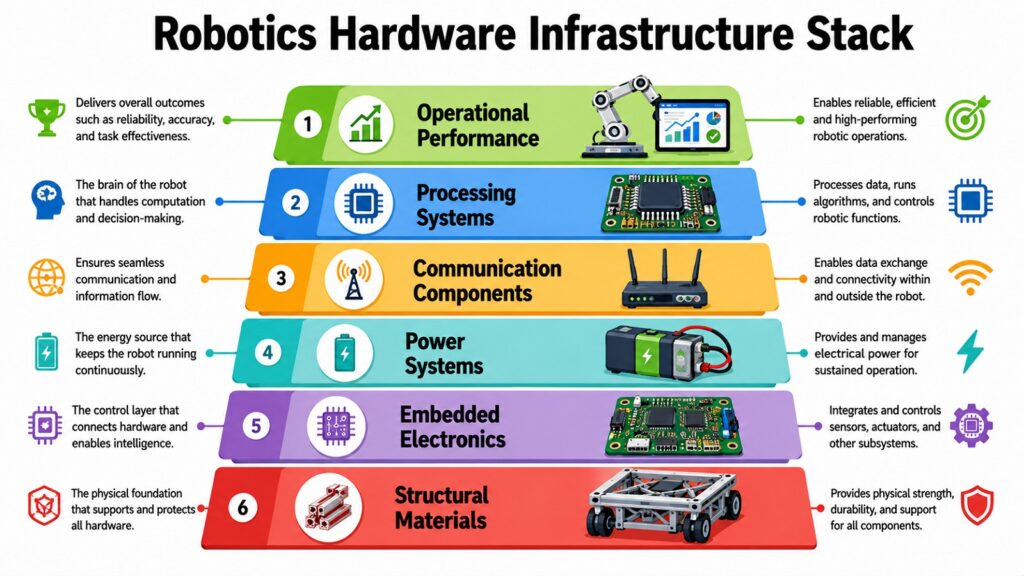
Even the most sophisticated robotic software is useless without the physical infrastructure to support it. Hardware infrastructure encompasses the components, power systems, processing units, cooling arrangements, and environmental supports that allow Robotics to function reliably over time. It is often overlooked in favor of more visible elements like sensing and artificial intelligence, but it determines whether a deployment succeeds or stumbles.
Power is the most fundamental infrastructure requirement. Robotic systems have varying energy demands depending on their size, speed, and task profile. A small collaborative robot on an assembly line may draw modest power continuously. A large automated guided vehicle fleet in a warehouse requires a coordinated charging infrastructure that keeps units available around the clock without creating bottlenecks. Battery technology, charging architecture, and power distribution all shape how effectively Robotics can be scaled.
Processing capability is equally important. Modern Robotics systems, especially those with rich perception and real-time decision-making, require significant computational resources. Edge processing, where calculations happen on or near the robot itself, reduces latency and allows faster response. Cloud offloading handles computationally intensive tasks like model training and fleet analytics. Hybrid arrangements balance speed and scalability, but they require infrastructure investment on both sides.
Thermal management is a less glamorous but genuinely critical concern. High-performance processors and motors generate heat, and heat accelerates component degradation. Robotic systems operating in warm environments, or running at high duty cycles, need adequate cooling arrangements to sustain performance and protect hardware from premature failure.
Environmental durability requirements vary significantly across deployment contexts. A robot operating in a clean room for pharmaceutical manufacturing faces very different conditions from one navigating an outdoor agricultural field or a humid food processing facility. The infrastructure surrounding the robot, including enclosures, materials, and sealing standards, must match the environment in which the system will spend its working life.
Organizations frequently underestimate infrastructure readiness when planning Robotics deployments. The robots themselves arrive on schedule. The facility modifications, power upgrades, and network installations that support them are often incomplete. This gap between robotic capability and infrastructure readiness is one of the most common causes of delayed operational benefits in Robotics programs.
Table 6: Robotics Hardware Infrastructure Components and Their Functional Contributions
| Infrastructure Component | Primary Functional Contribution |
| Battery system | Provides mobile power and determines operational duration |
| Charging infrastructure | Maintains fleet availability through managed energy cycles |
| Edge processing unit | Enables low-latency computation at the point of operation |
| Cloud computing link | Supports analytics, model updates, and fleet coordination |
| Cooling system | Protects processors and actuators from thermal degradation |
| Structural enclosure | Guards components against environmental and physical hazards |
| Actuator hardware | Converts electrical commands into reliable mechanical movement |
| Communication hardware | Connects robots to networks and coordination systems |
6. Robotics Connectivity and Integration: Expanding Robotics into Technology Ecosystems
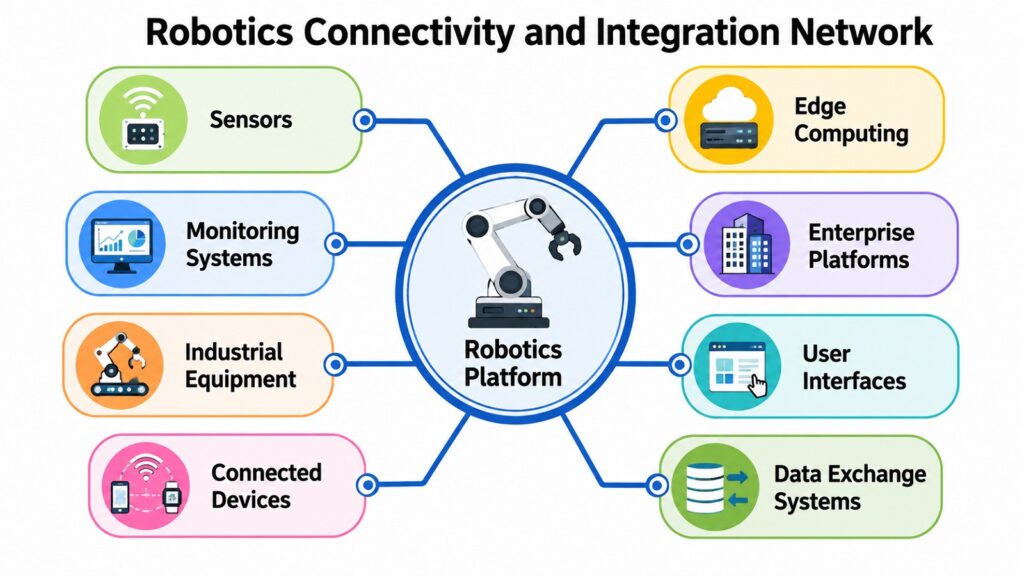
A robotic system working in isolation is limited by what it can perceive and decide on its own. One that is connected to the broader technology environment around it becomes part of something larger. Connectivity and integration are the mechanisms that expand Robotics beyond individual machines into coordinated operational networks.
At the most basic level, connectivity allows robots to communicate with each other and with central management systems. A fleet of automated guided vehicles navigating a warehouse needs to share position data, task assignments, and path information in real time. Without that communication, vehicles collide, tasks duplicate, and efficiency collapses. Connectivity is the coordination layer that makes multi-robot systems viable.
Integration with enterprise applications extends this value further. A Robotics system connected to a warehouse management platform can receive picking instructions directly from inventory databases, confirm task completion, and update records without human intervention. The same logic applies in manufacturing, where robots integrated with production planning systems can adjust their task queues based on demand changes and material availability.
Industrial communication protocols have evolved to support these integrations. Standards like OPC-UA, MQTT, and ROS 2 provide common languages through which robotic systems and industrial software platforms can exchange information reliably. These protocols reduce the custom engineering effort required to connect new robots to existing environments, which lowers integration cost and accelerates deployment timelines.
Data generated by connected Robotics systems is itself a valuable resource. Operational logs, sensor readings, maintenance records, and performance metrics create a picture of how systems behave over time. Organizations that analyze this data can identify patterns, predict failures before they occur, and optimize workflows based on evidence rather than assumption.
The strategic implication is clear. Isolated Robotics capability has value, but integrated Robotics capability creates compounding value. Every connection to an adjacent system opens new possibilities for coordination, data sharing, and process improvement. The investment required to achieve integration is real, but the return compounds over time in a way that isolated deployments never can.
Table 7: Robotics Integration Approaches and Their Practical Advantages
| Integration Approach | Practical Advantage |
| Fleet management system | Coordinates multiple robots to eliminate conflicts and duplication |
| Warehouse management link | Synchronizes picking tasks with live inventory data |
| ERP integration | Aligns production schedules with robotic task queues |
| OPC-UA protocol | Enables standardized communication across industrial platforms |
| MQTT messaging | Supports lightweight, real-time data exchange in large fleets |
| Predictive maintenance link | Uses sensor data to anticipate and prevent system failures |
| Cloud analytics platform | Aggregates operational data for performance and planning insights |
| Digital twin connection | Mirrors physical robot state for simulation and optimization |
7. Robotics Applications: Transforming Industries Through Robotics
Foundations explain how Robotics is built and organized. Applications show what it actually does in the world. When the structural, perceptual, mechanical, interactive, and infrastructural foundations come together, Robotics produces outcomes that are visible, measurable, and often transformative for the organizations and industries that adopt it.
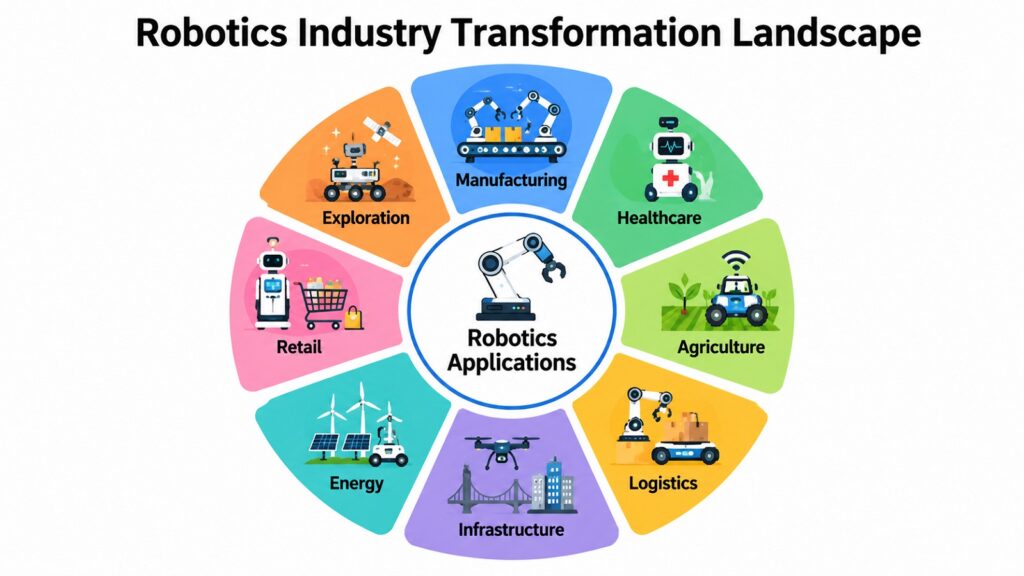
Manufacturing was the first industry to embrace Robotics at scale, and it remains one of the most extensively automated sectors. Robotic welding, painting, assembly, and quality inspection have become standard practice in automotive, electronics, and heavy equipment production. These applications reduce defect rates, increase throughput, and allow factories to maintain consistent output around the clock without the variability that comes with fully human-operated production.
Healthcare Robotics is one of the fastest growing application areas. Surgical assistance systems allow procedures to be performed with finer precision than unaided human hands can achieve. Robotic exoskeletons support rehabilitation by guiding patients through repeated therapeutic movements. Pharmacy robots dispense medications with high accuracy, reducing errors in high-volume hospital settings. Each of these applications addresses a genuine clinical need rather than simply replacing human tasks.
Agriculture is undergoing a quiet Robotics transformation. Autonomous tractors and spraying systems reduce input costs and environmental impact by applying fertilizers and pesticides only where needed. Harvesting robots address labor availability challenges in regions where seasonal agricultural work is difficult to staff. Monitoring drones provide data on crop health that allows intervention before problems become severe. These applications are still maturing, but the economic and environmental incentives driving adoption are strong.
Logistics and fulfillment have become major Robotics application zones as e-commerce has grown. Automated storage and retrieval systems maximize warehouse density. Mobile picking robots navigate fulfillment centers alongside human workers. Sorting systems process packages faster and more accurately than manual methods. Last-mile delivery experiments with autonomous vehicles and robotic carriers are still evolving, but the direction of travel is clear.
Construction Robotics is at an earlier stage but growing in relevance. Bricklaying, rebar tying, and concrete finishing robots address labor shortage challenges and improve consistency on sites where manual work quality is difficult to standardize. These applications are not yet as mature as those in manufacturing or logistics, but the pressure to build faster and more cost-effectively is accelerating development.
What these diverse applications share is that they convert foundational Robotics capability into real operational value. The sensor precision, motion control, architectural suitability, and integration quality discussed in earlier sections all show up in the effectiveness of real-world applications. This is where Robotics earns its place in organizational strategy.
Table 8: Robotics Applications Across Industries and Representative Use Cases
| Industry | Representative Robotics Use Case |
| Manufacturing | Automated welding, assembly, and defect inspection |
| Healthcare | Surgical assistance, rehabilitation exoskeletons, pharmacy dispensing |
| Agriculture | Autonomous crop spraying, harvesting, and field monitoring |
| Logistics | Warehouse picking, automated sorting, and inventory management |
| Construction | Bricklaying, rebar tying, and finishing automation |
| Retail | Inventory scanning, shelf restocking, and autonomous checkout |
| Defense | Reconnaissance drones, bomb disposal, and perimeter monitoring |
| Mining | Autonomous drilling, hauling, and underground inspection |
8. Robotics Ethics and Governance: Building Responsible and Sustainable Robotics
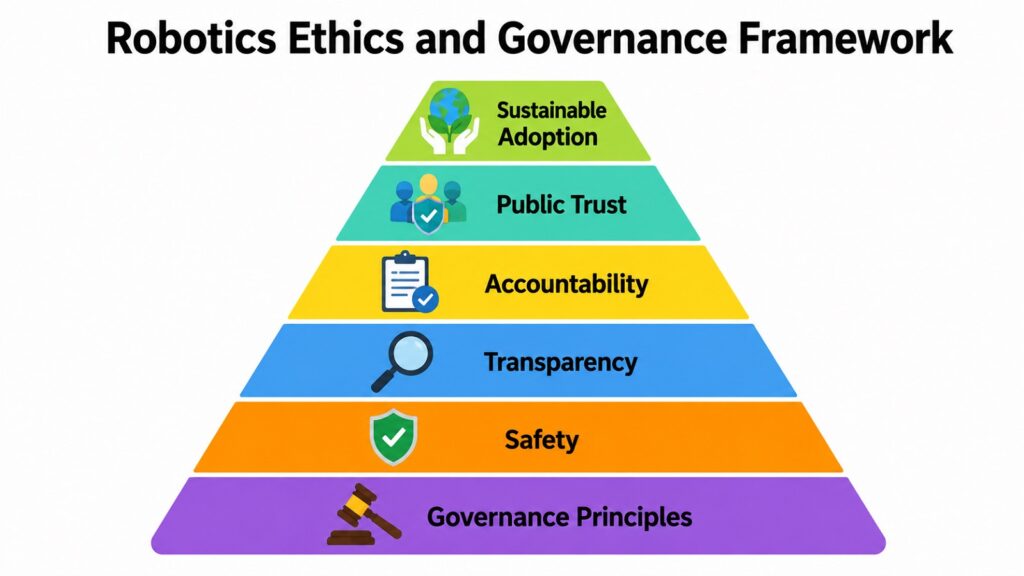
Technology without governance tends toward excess. Robotics is no exception. As systems become more capable, more autonomous, and more deeply embedded in organizational and social life, the questions of how they should behave, who is responsible for their actions, and what constraints should apply to their deployment become pressing practical concerns rather than abstract philosophical ones.
Ensuring safety is the foremost priority in governance. Robotic systems that function in proximity to individuals, manage delicate materials, or make decisions that have real-world implications must adhere to clearly established safety standards. These standards are not intended to hinder innovation; rather, they are designed to guarantee that implementations do not introduce new risks more rapidly than organizations can control them. The foundation of responsible deployment practices is built upon safety certification, testing protocols, and requirements for incident reporting.
Accountability is closely related to safety but distinct from it. When a robotic system causes harm, whether through a malfunction, a design flaw, or an edge case the developers did not anticipate, it must be possible to determine responsibility. Legal and regulatory frameworks for Robotics accountability are still developing in most jurisdictions, but organizations deploying advanced systems cannot wait for legislation to catch up. Building internal accountability structures now is both practical and prudent.
Employment displacement is one of the most widely discussed ethical dimensions of Robotics adoption. The concern is genuine. Automation does change the composition of labor markets, and the adjustment is not always smooth or equitable. Organizations deploying Robotics at scale have an interest in engaging with this question directly, through workforce transition programs, retraining investments, and transparent communication about how automation will affect roles over time.
Data privacy becomes relevant in Robotics systems that collect information about people and environments. Robots equipped with cameras and audio sensors in public or semi-public spaces generate personal data as a byproduct of their operation. Governance frameworks need to address what data is collected, how long it is retained, who can access it, and under what conditions it may be used for purposes beyond the immediate operational task.
The lesson learned from other technology sectors is that delaying the establishment of oversight structures until issues arise is expensive. The field of robotics has both the opportunity and the responsibility to create strong governance frameworks while the technology is still in its developmental stages. Organizations that undertake this initiative now will discover that governance transforms into a competitive edge instead of merely a compliance obligation, fostering the trust necessary for wider and more enduring adoption.
Table 9: Robotics Governance Considerations and Their Practical Implications
| Governance Consideration | Practical Implication |
| Safety certification | Confirms systems meet minimum standards before deployment |
| Accountability framework | Assigns responsibility when robotic actions cause harm |
| Transparency in decision-making | Allows review of how autonomous choices are reached |
| Workforce transition planning | Manages employment impact and supports affected workers |
| Data privacy compliance | Governs personal data collected by robotic sensors |
| Incident reporting protocol | Enables learning and correction after system failures |
| Regulatory engagement | Shapes policy development with practical deployment insight |
| Bias and fairness auditing | Identifies discriminatory outcomes in automated decisions |
Conclusion: Robotics as the Strategic Foundation of Future Technology
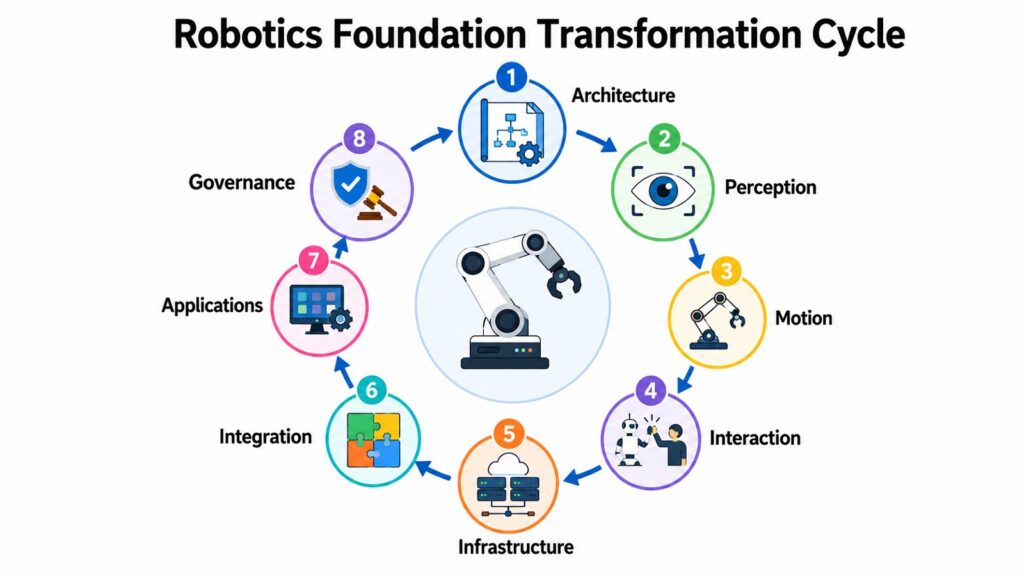
Eight foundations. Each one is distinct, but each one is dependent on the others. Robotics architecture determines what systems can physically achieve. Sensors and perception give them awareness. Motion and control transform that awareness into deliberate action. Human-robot interaction connects the capability to the people who use and work alongside it. Hardware infrastructure provides the physical platform on which everything else depends. Connectivity and integration place individual systems inside networks that multiply their value. Applications translate all of this into outcomes that matter in the real world. And governance ensures that what Robotics can do aligns with what it should do.
None of these foundations stands alone. A system with excellent architecture but poor perception will fail in dynamic environments. A system with precise motion control but inadequate infrastructure will be unreliable in practice. A system with powerful applications but weak governance will generate resistance and regulatory risk that undermines its long-term viability. The value of Robotics, at its highest expression, emerges from the interaction of all eight foundations working in concert.
It is also worth remembering that Robotics is an evolving ecosystem, not a fixed state. The foundations described in this article reflect the current state of a technology that is still maturing rapidly. Sensing capabilities will continue to improve. Control algorithms will become more sophisticated. Integration will deepen as more systems become connected. New applications will emerge in sectors that have not yet seen meaningful Robotics adoption. And governance frameworks will develop as societies work through the questions that widespread automation raises.
Organizations that want to benefit from Robotics in the long run need to develop literacy across all eight foundations. That does not mean becoming technical experts in every area. It means understanding what each foundation contributes, how failures in one area affect the others, and how strategic investment across the ecosystem creates more durable value than point solutions ever can.
Table 10: Robotics Contributions Across Major Technology and Business Domains
| Domain | How Robotics Contributes |
| Manufacturing | Improves throughput, consistency, and defect control |
| Healthcare | Enhances surgical precision and expands rehabilitation capacity |
| Supply chain | Accelerates fulfillment and reduces handling errors |
| Agriculture | Reduces input costs and addresses seasonal labor shortages |
| Data and analytics | Generates operational data that drives continuous improvement |
| Workforce design | Shifts human roles toward judgment, oversight, and innovation |
| Safety management | Removes people from hazardous tasks and reduces incident rates |
| Sustainability | Optimizes energy and resource use in production and logistics |